|
Peiyun Hu
I am a research scientist at Apple with Vladlen Koltun. I received my PhD in Robotics from the Carnegie Mellon University Robotics Institute, where I was advised by Deva Ramanan. My research lies at the intersection of computer vision and robotics, exploring how machines can perceive and anticipate the world around them, from recognizing subtle visual details to reasoning about 3D structure and anticipating how the world unfolds over time. Prior to my current role, I worked at Argo AI and later at Apple SPG.
|
 |
|
CoMotion: Concurrent Multi-person 3D Motion
Alejandro Newell,
Peiyun Hu,
Lahav Lipson,
Stephan Richter,
Vladlen Koltun
International Conference on Learning Representations (ICLR), 2025
paper /
code
|
|
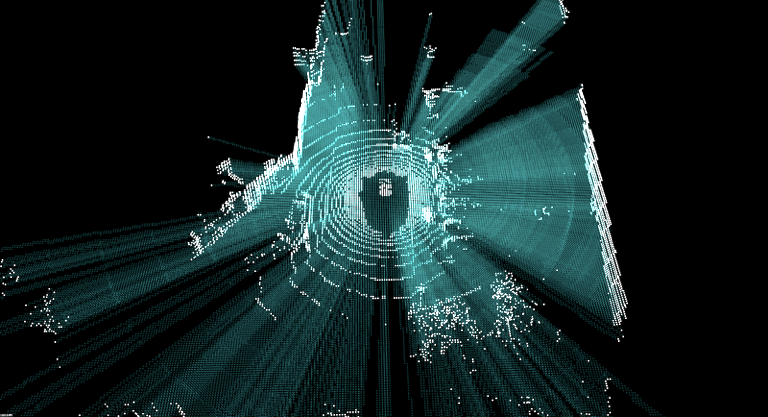
Point Cloud Forecasting as a Proxy for 4D Occupancy Forecasting
Tarasha Khurana*,
Peiyun Hu*,
David Held,
Deva Ramanan
Computer Vision and Pattern Recognition (CVPR), 2023
paper /
project /
talk /
code
|

|
Differentiable Raycasting for Self-Supervised Planning
Tarasha Khurana*,
Peiyun Hu*,
Achal Dave,
Jason Ziglar,
David Held,
Deva Ramanan
European Conference on Computer Vision (ECCV), 2022
paper /
project /
code
|
|
Safe Local Motion Planning with Self-Supervised Freespace Forecasting
Peiyun Hu,
Aaron Huang,
John Dolan,
David Held,
Deva Ramanan
Computer Vision and Pattern Recognition (CVPR), 2021
paper
/
project /
poster /
talk /
code
|
|
Active Perception using Light Curtains for Autonomous Driving
Siddharth Ancha,
Yaadhav Raaj,
Peiyun Hu,
Srinivasa Narasimhan,
David Held
European Conference on Computer Vision (ECCV), 2020
(Spotlight Presentation)
paper /
project /
slides
/
talk /
code
|
|
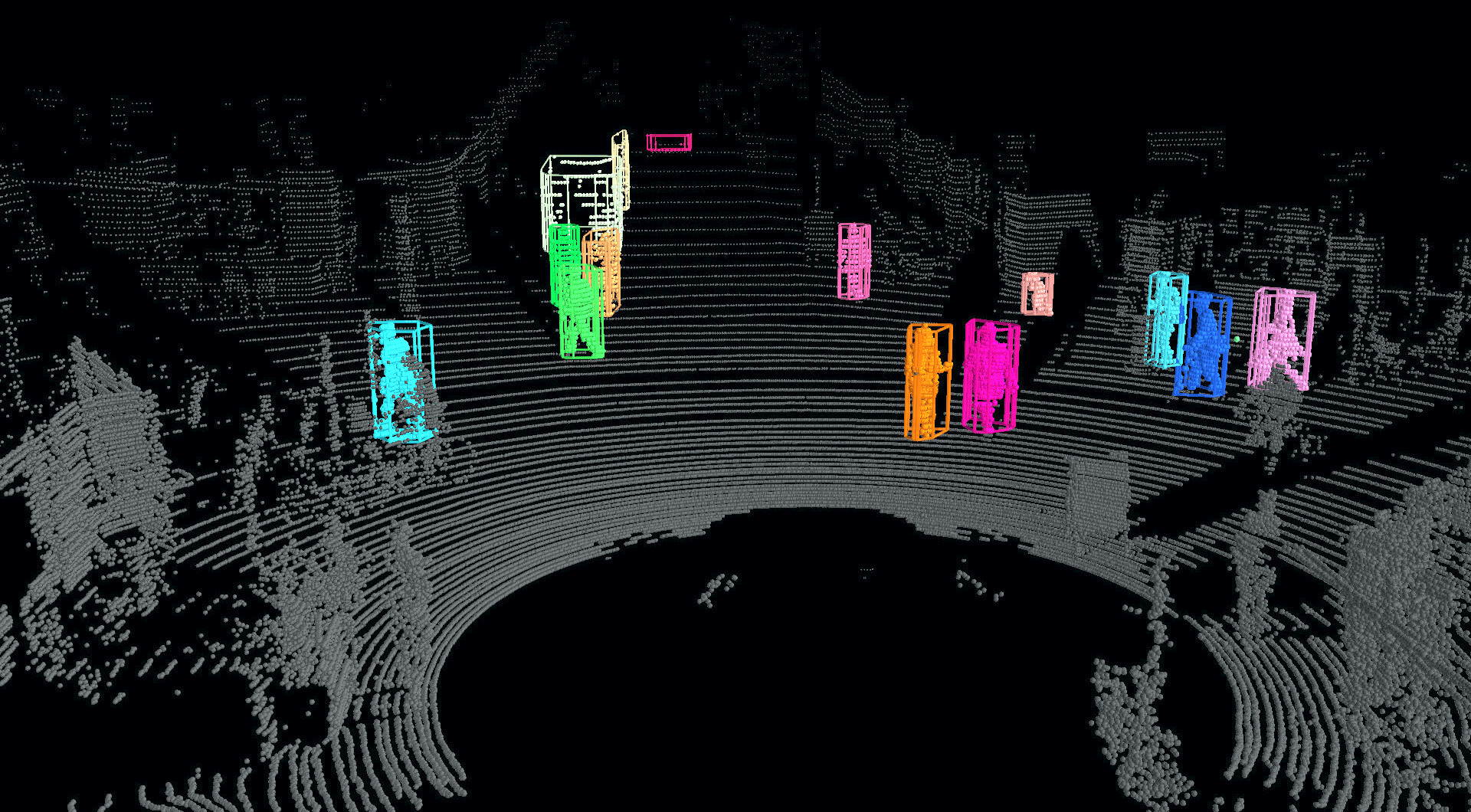
What You See is What You Get: Exploiting Visibility for 3D Object Detection
Peiyun Hu,
Jason Ziglar,
David Held,
Deva Ramanan
Computer Vision and Pattern Recognition (CVPR), 2020
(Oral Presentation)
paper
/
project /
slides /
talk /
demo /
code
|
|
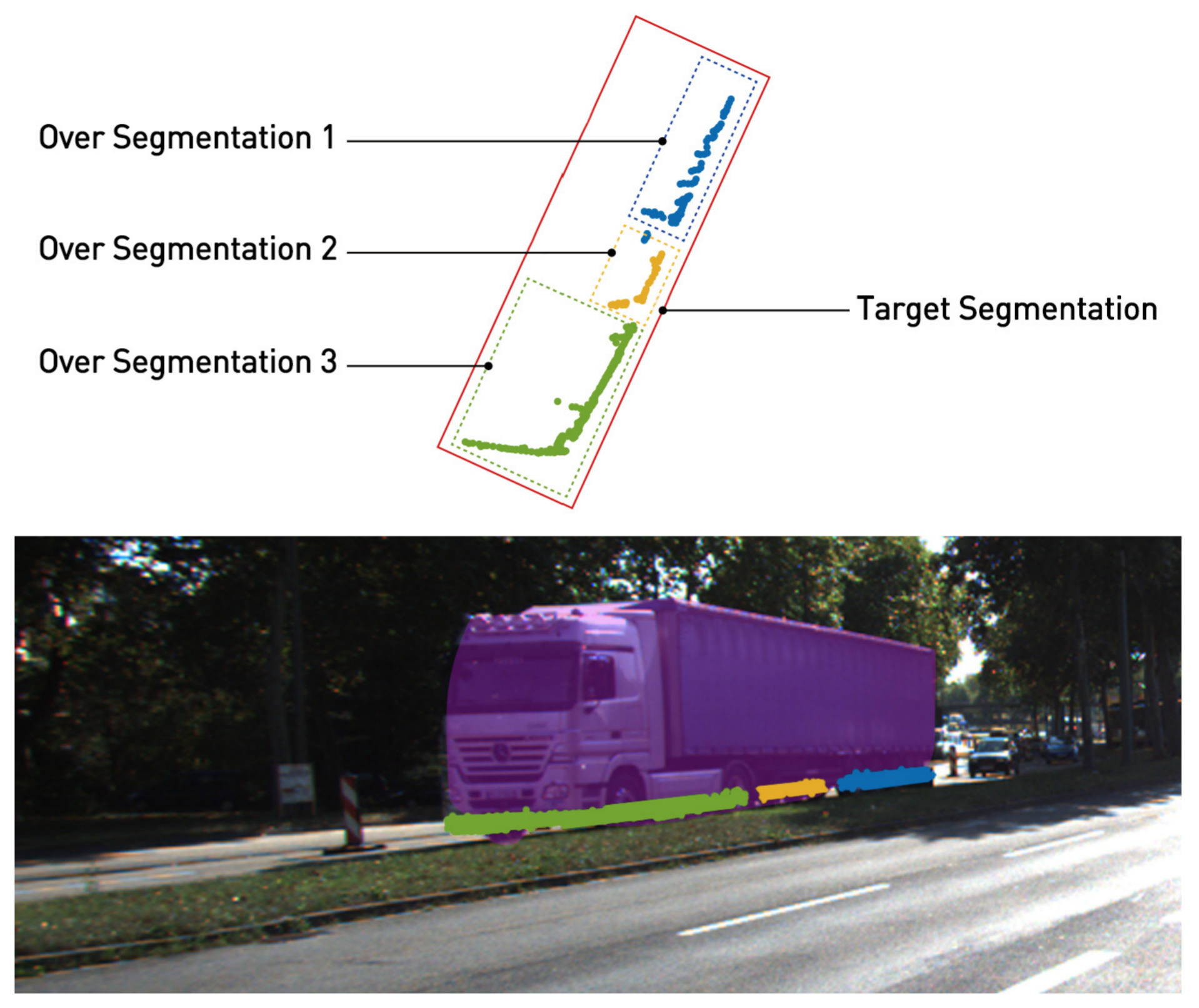
Learning to Optimally Segment Point Clouds
Peiyun Hu, David Held*,
Deva Ramanan*
IEEE Robotics and Automation Letters (RA-L) and ICRA, 2020
paper /
project /
slides /
talk /
demo /
code
|
|
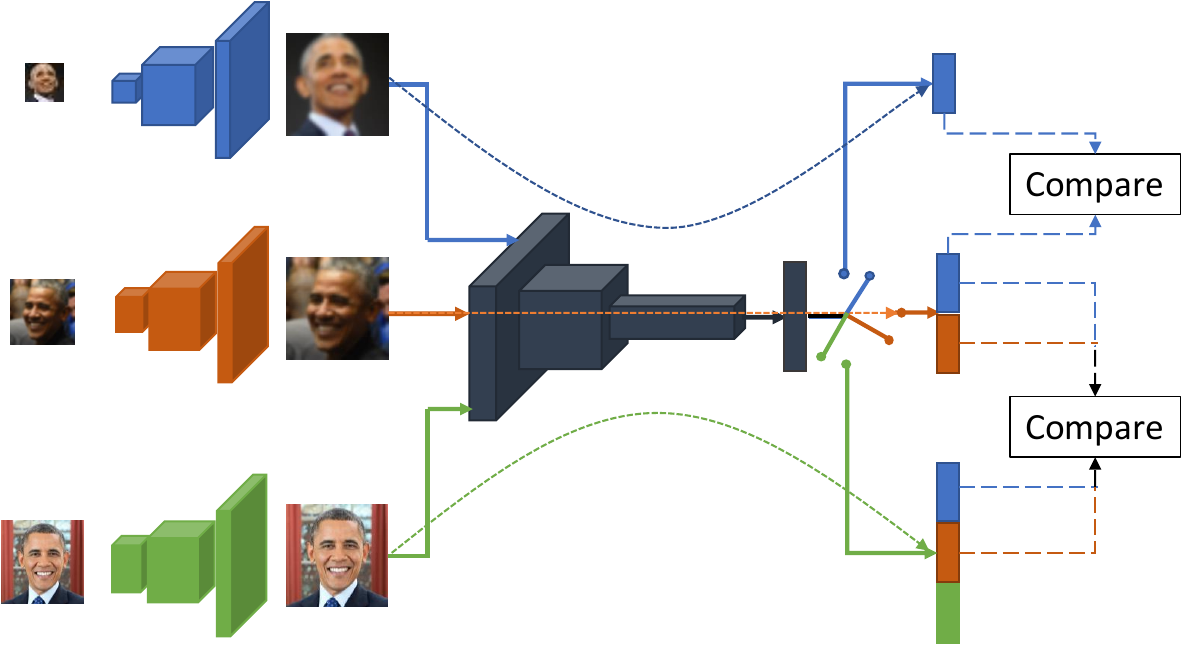
Recognizing Tiny Faces
Siva Chaitanya Mynepalli,
Peiyun Hu,
Deva Ramanan
Computer Vision and Pattern Recognition Workshops (CVPR-W), 2019
paper
|
|
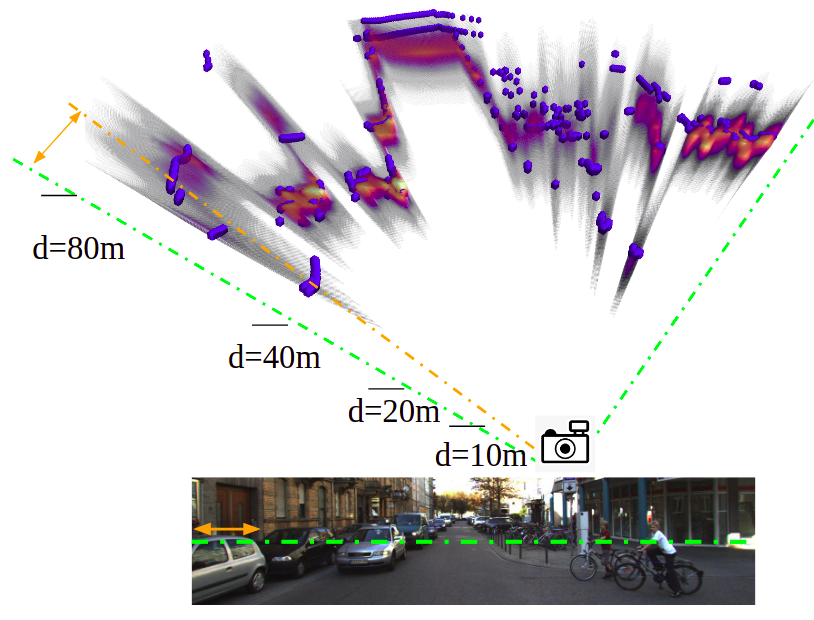
Inferring Distributions Over Depth from a Single Image
Gengshan Yang,
Peiyun Hu,
Deva Ramanan
IEEE International Conference on Intelligent Robots and Systems (IROS), 2019
paper /
project /
slides
/
code
|
|
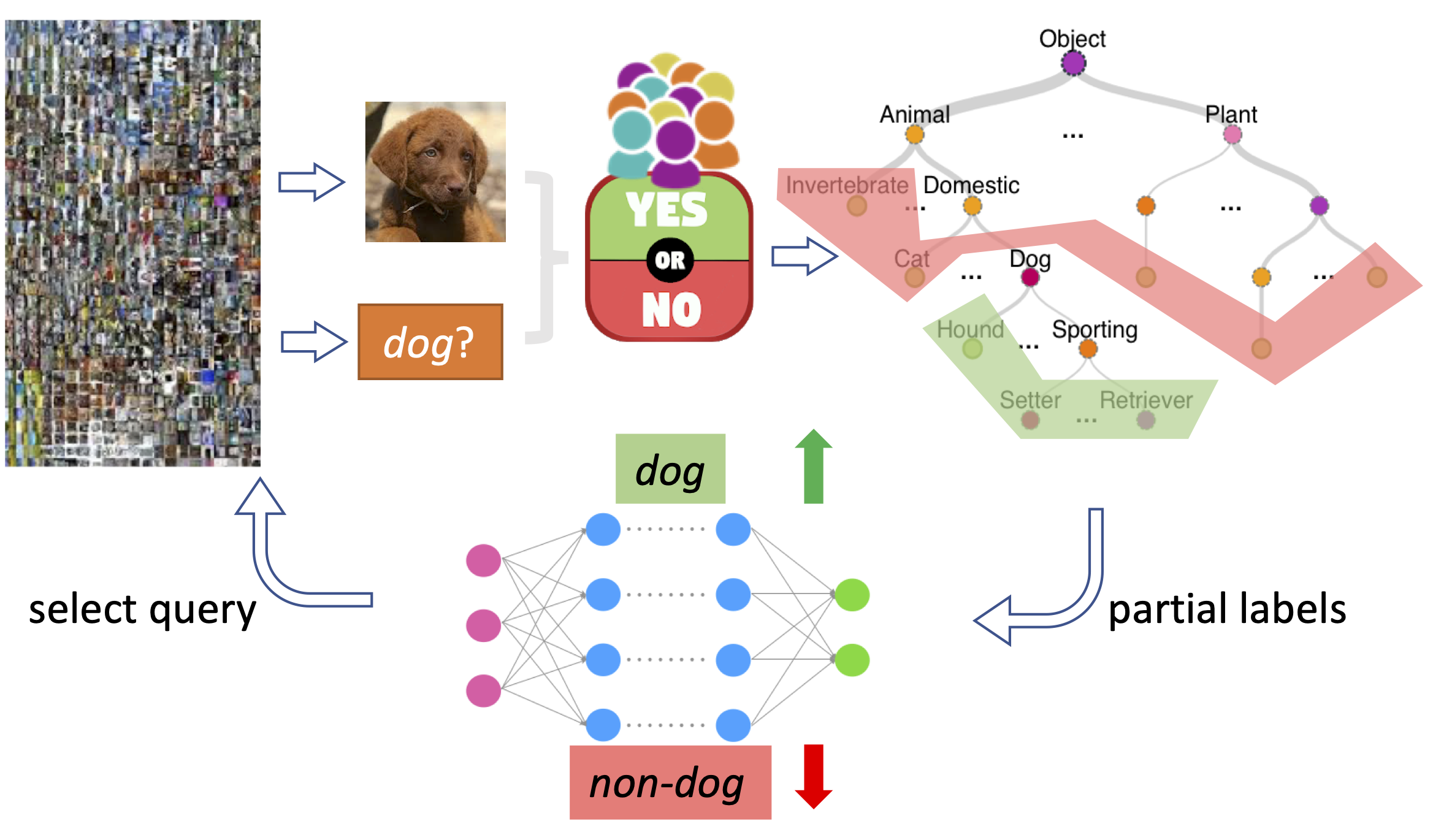
Active Learning with Partial Feedback
Peiyun Hu, Zack C. Lipton,
Anima Anandkumar,
Deva Ramanan
International
International Conference on Learning Representations (ICLR), 2019
paper /
poster /
code
|
|
Camera-based Semantic Enhanced Vehicle Segmentation for Planar LIDAR
Chen Fu,
Peiyun Hu,
Chiyu Dong,
Christoph Mertz,
John Dolan
International Conference on Intelligent Transportation Systems (ISTC), 2018
paper
|

|
Comparing Apples and Oranges: Off-Road Pedestrian Detection on the NREC Agricultural
Person-Detection Dataset
Zachary Pezzementi,
Trenton Tabor,
Peiyun Hu,
Jonathan K. Chang,
Deva Ramanan,
Carl Wellington,
Benzun P. Wisely Babu,
Herman Herman
Journal of Field Robotics (JFR), 2018
paper /
project
/
video
|

|
Unconstrained Face Detection and Open-Set Face Recognition Challenge
Manuel Gunther,
Peiyun Hu,
Christian Herrmann,
Chi-Ho Chan,
Min Jiang,
Shufan Yang,
Akshay Raj Dhamija,
Deva Ramanan,
Jurgen Beyerer,
Josef Kittler,
Mohamad Al Jazaery,
Mohammad Iqbal Nouyed,
Guodong Guo,
Cezary Stankiewicz,
Terrance E Boult
IEEE International Joint Conference on Biometrics (IJCB), 2017
paper
|
|
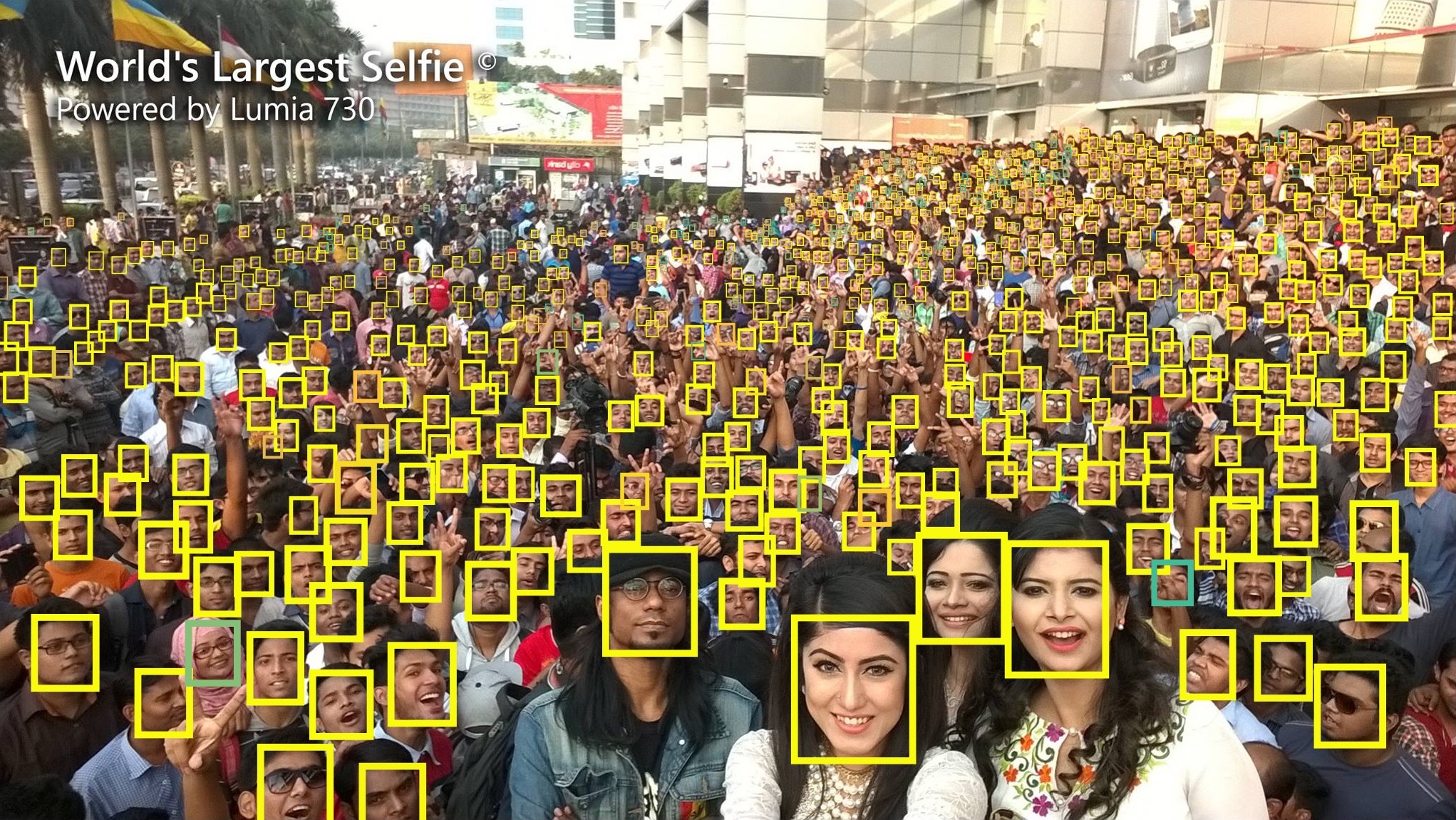
Finding Tiny Faces
Peiyun Hu,
Deva Ramanan
Computer Vision and Pattern Recognition (CVPR), 2017
paper
/
project /
video /
poster /
press /
code
|
|
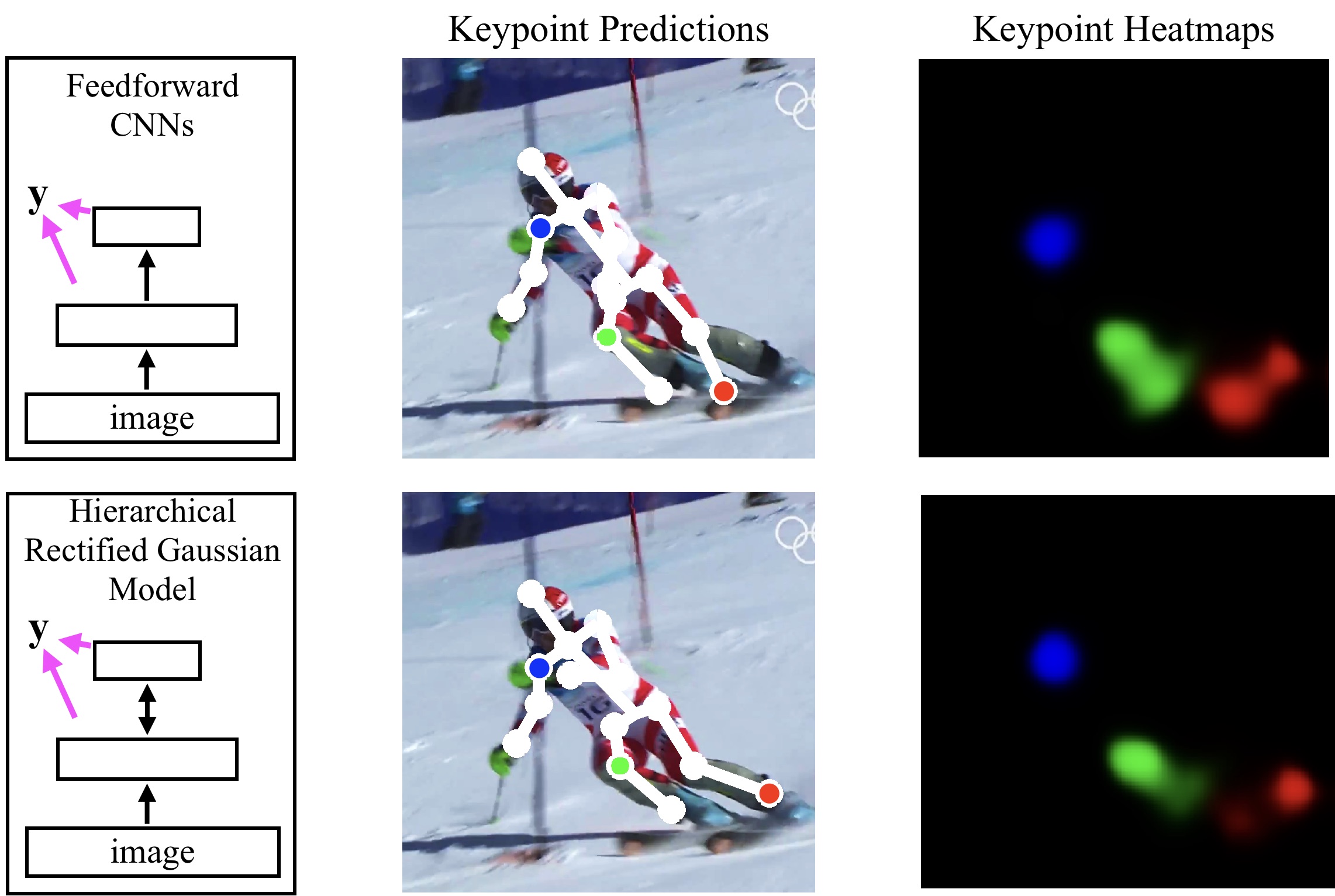
Bottom-Up and Top-Down Reasoning with Hierarchical Rectified Gaussians
Peiyun Hu,
Deva Ramanan
Computer Vision and Pattern Recognition (CVPR), 2016
(Spotlight Presentation)
paper
/
project /
ext. abstract /
slides /
talk /
poster /
code
|
|